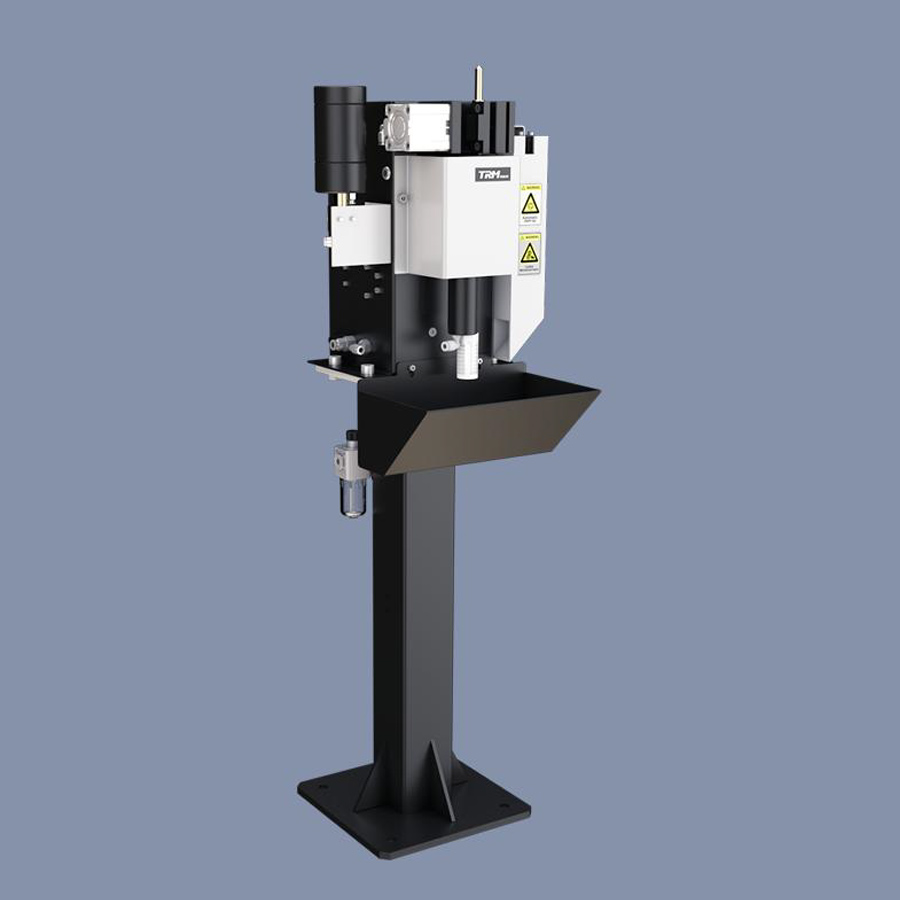
| Modelo | Estación de limpieza de pistola neumática SC230A SE |
| Presión de aire de entrada | Aire comprimido seco sin aceite, 5.5-8 BAR |
| Consumo de aire | aproximadamente 10L/S |
| Motor neumático | Aproximadamente 650 RPM, par máximo 8 Nm |
| Voltaje/corriente de control | 24VDC /IMAX=0.15A |
| Capacidad de corte | Alambre de soldadura sólido máximo 1.6mm |
| | Alambre de soldadura tubular máximo 3.2mm |
| Tiempo de corte | Aproximadamente 0.5 segundos |