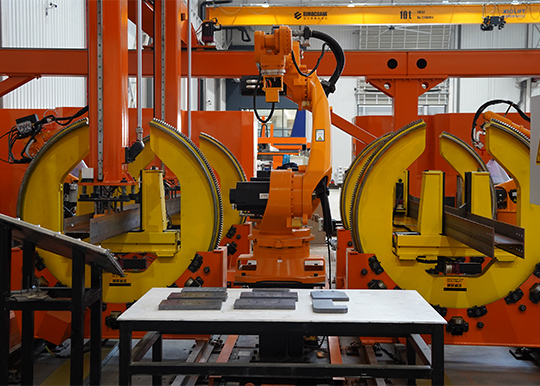
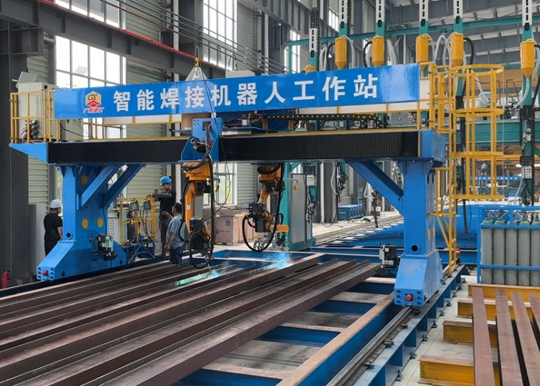
1) Utilizar una grúa puente para elevar la placa a la estación de trabajo;
2) Iniciar el robot para que realice el escaneo;
3) Generar automáticamente programas de soldadura/corte tras finalizar el escaneo;
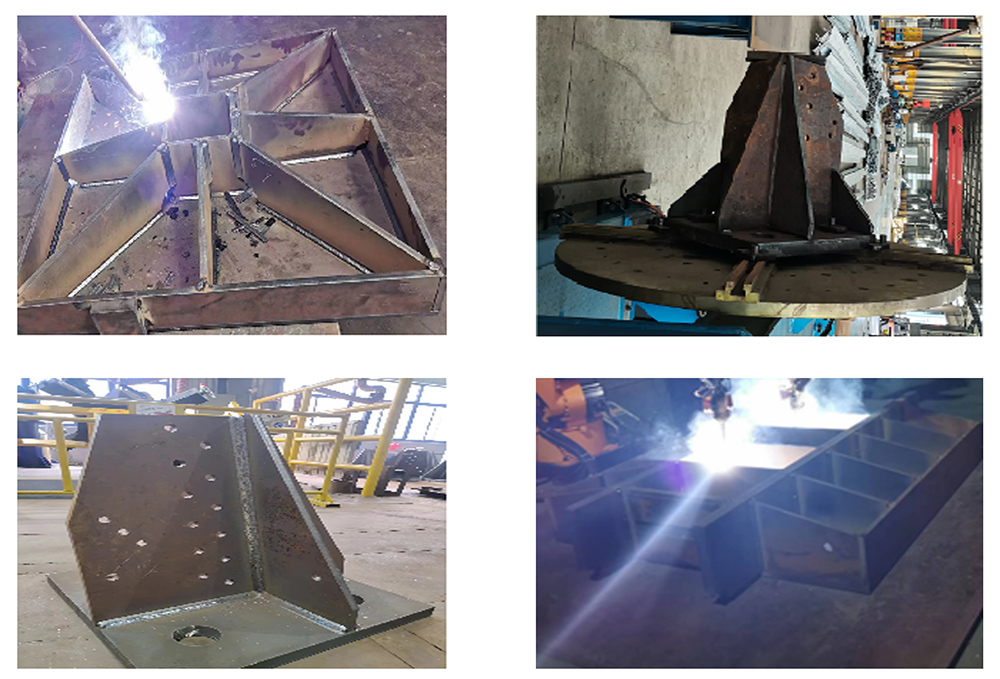
4) Ejecutar las operaciones de soldadura/corte;
5) Una vez finalizada la soldadura/corte, el robot escanea y suelda/corta otra placa. Mientras tanto, transportar manualmente la pieza terminada e izar una nueva placa a la estación de trabajo, completando así un ciclo de operaciones alternas.