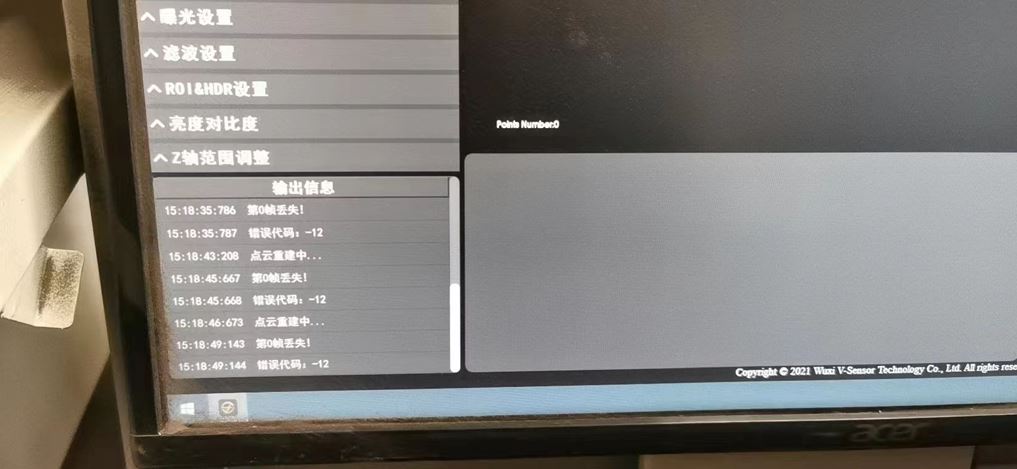
Descripción del problema:
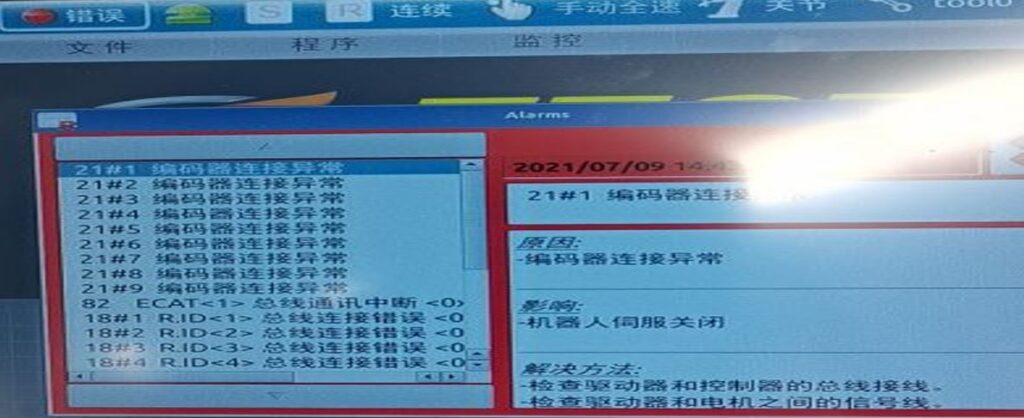
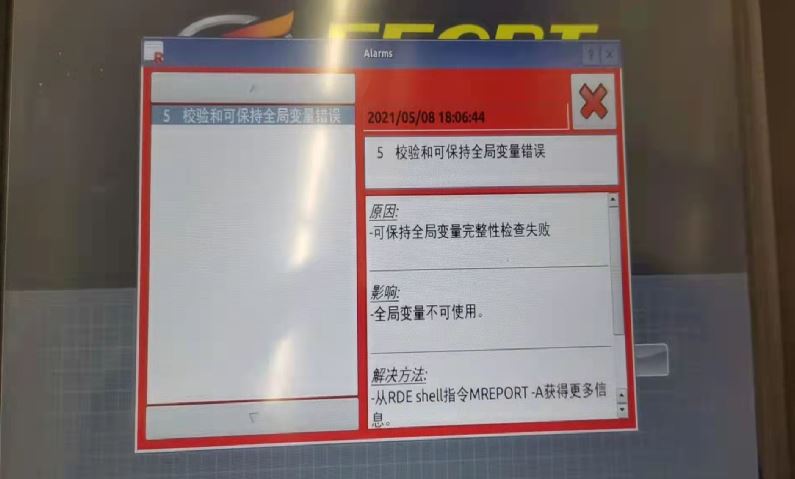
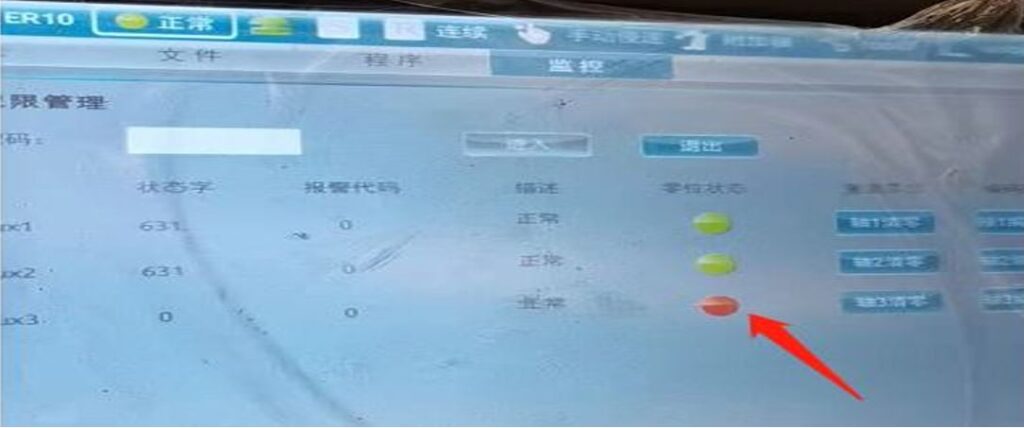
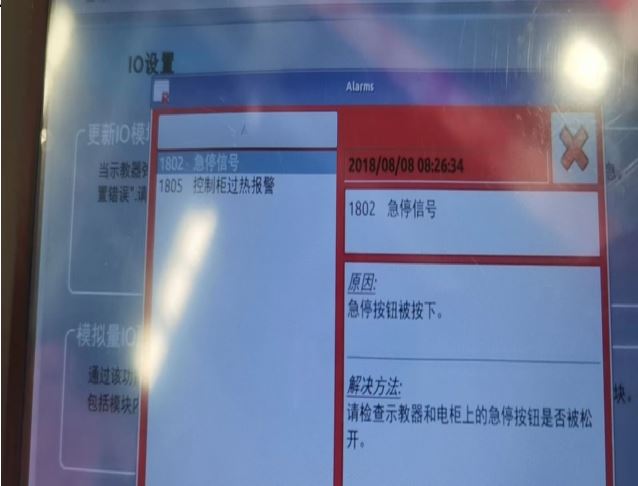
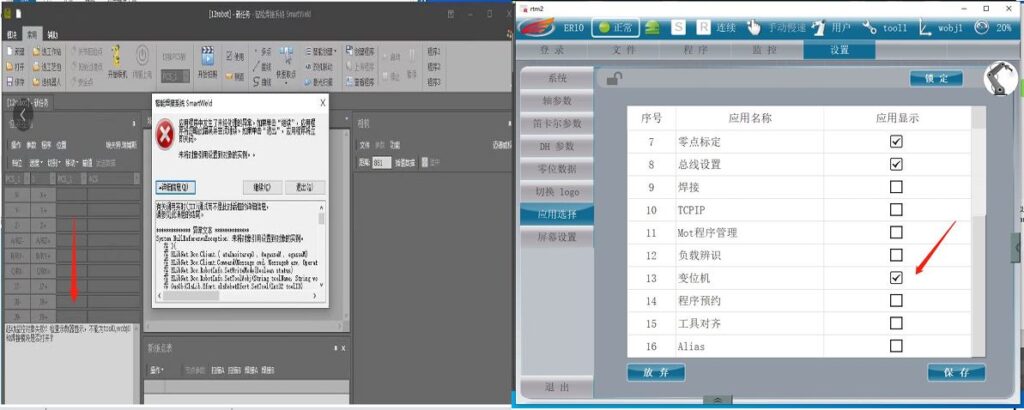
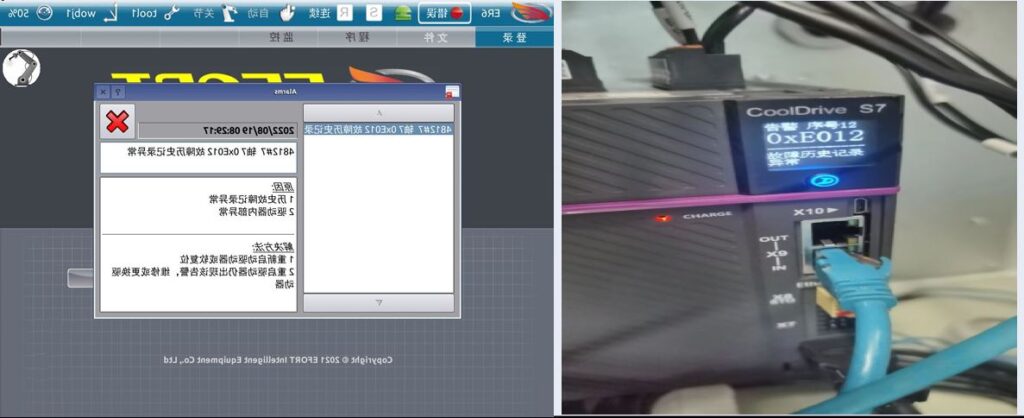
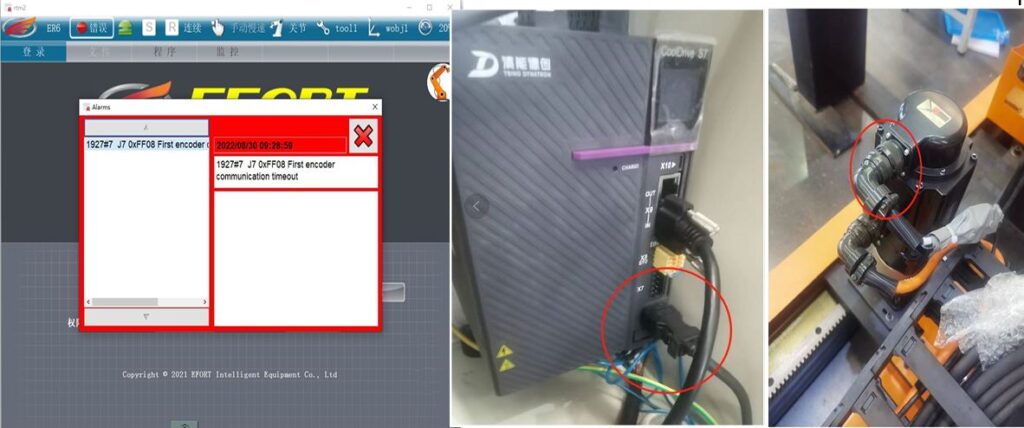
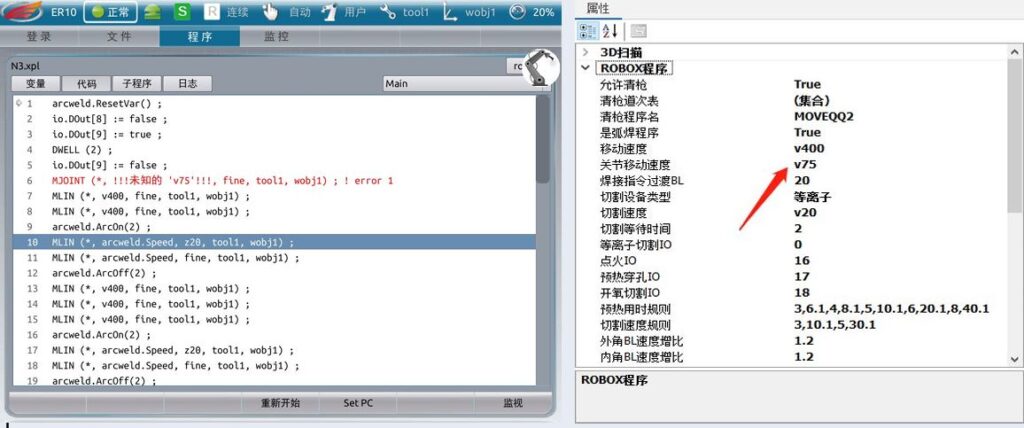
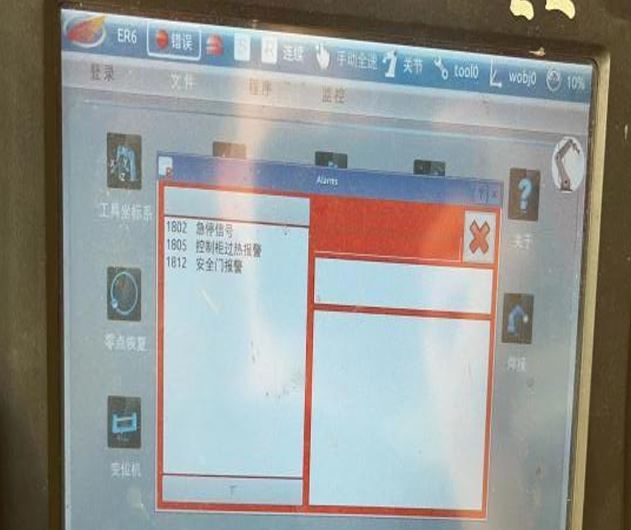
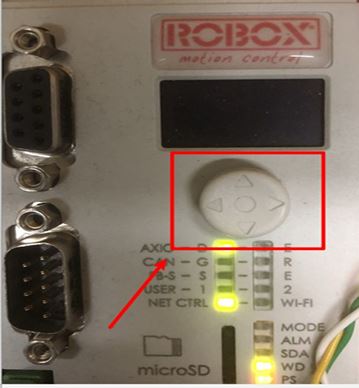
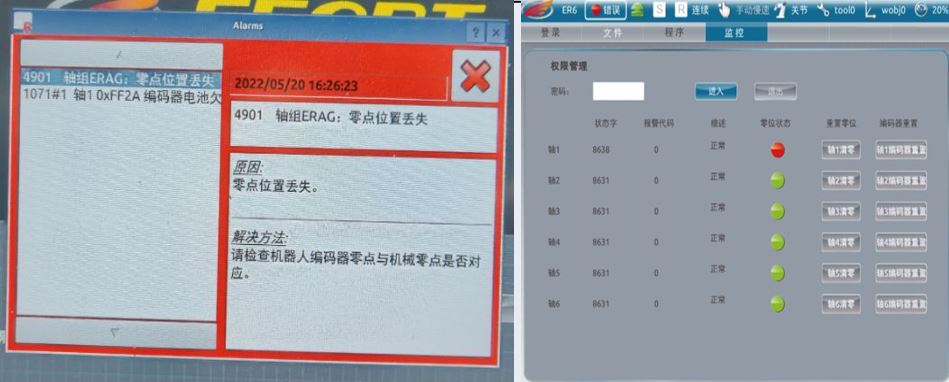
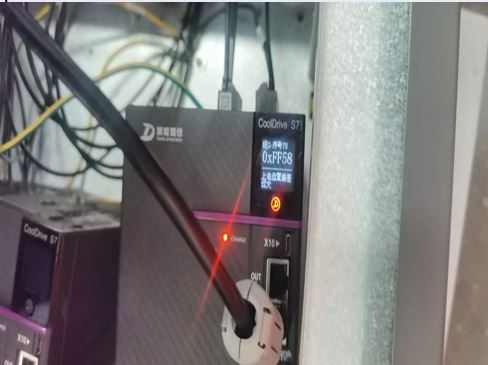
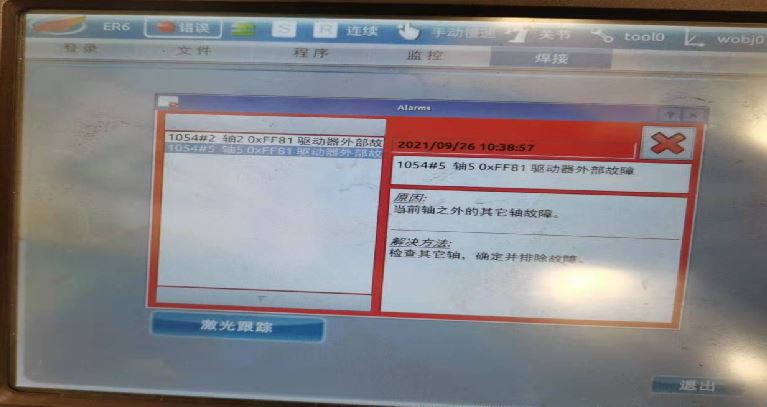
El servo no puede encenderse, uno de los seis controladores de eje muestra luz roja, no hay alarma en el colgante de enseñanza.
Método de solución:
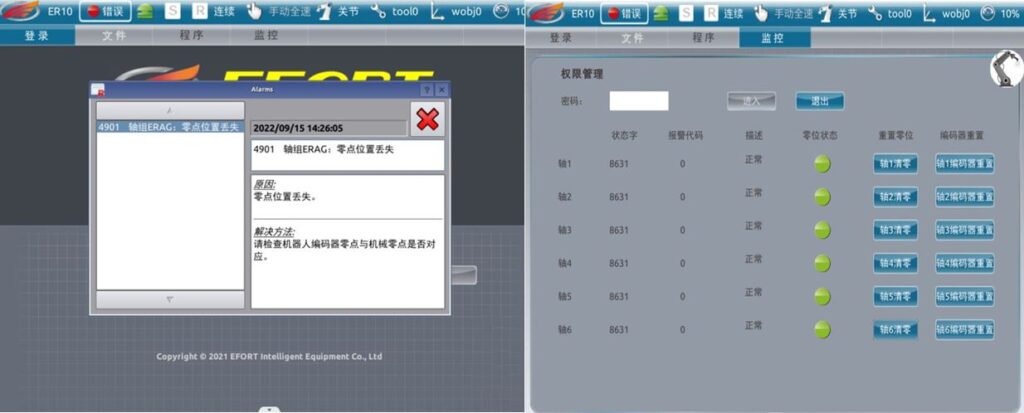
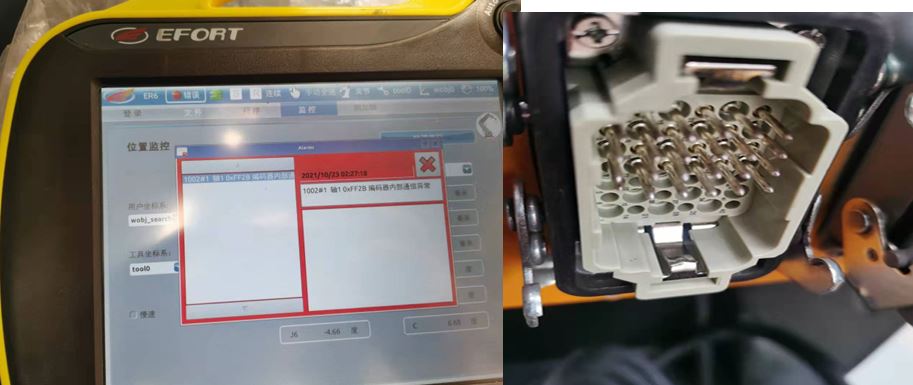
Primero, si los seis ejes muestran alarma pero el colgante de enseñanza no muestra ninguna, descarte problemas con el colgante de enseñanza y la comunicación.
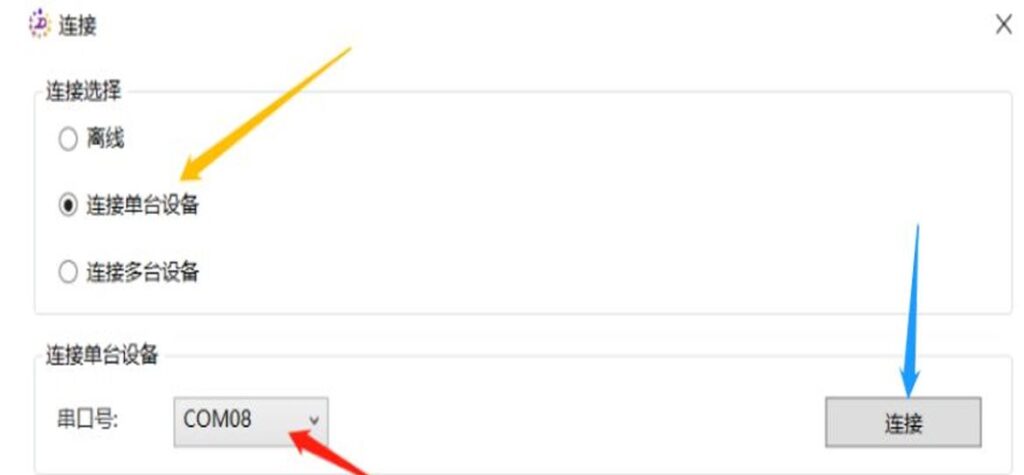
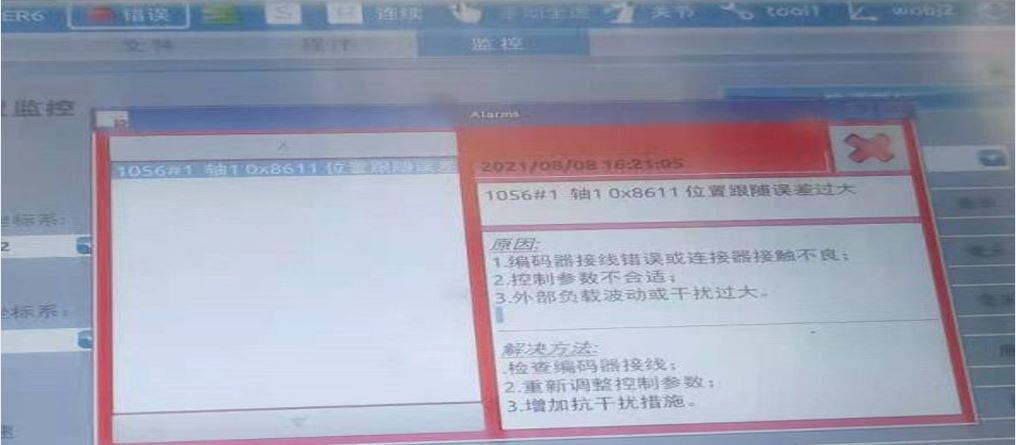
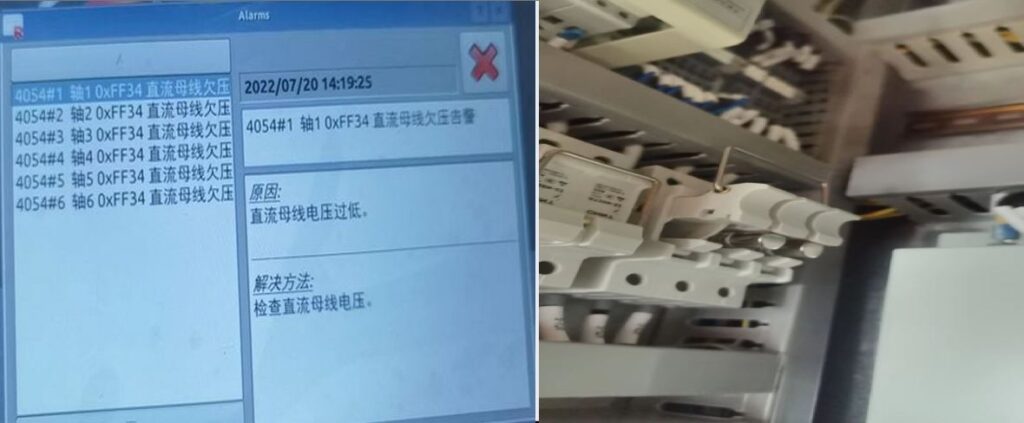
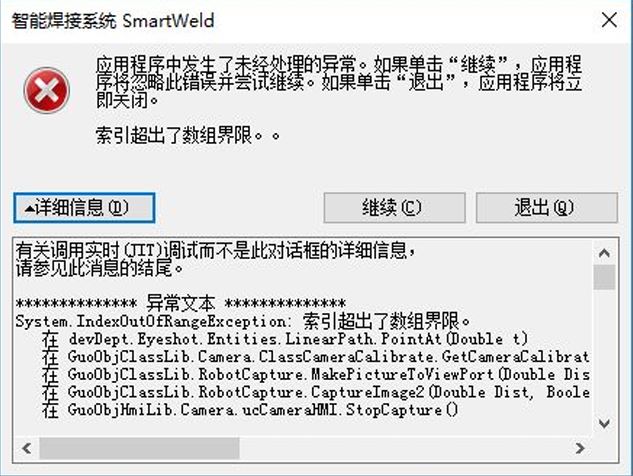
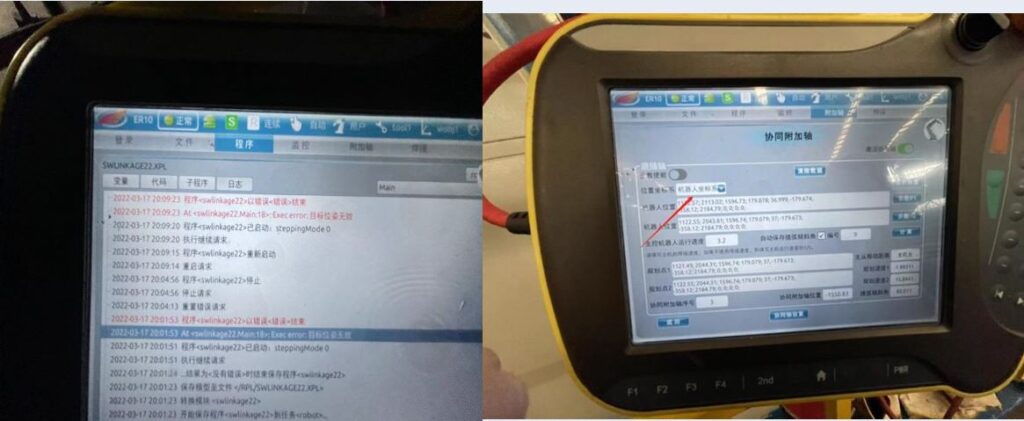
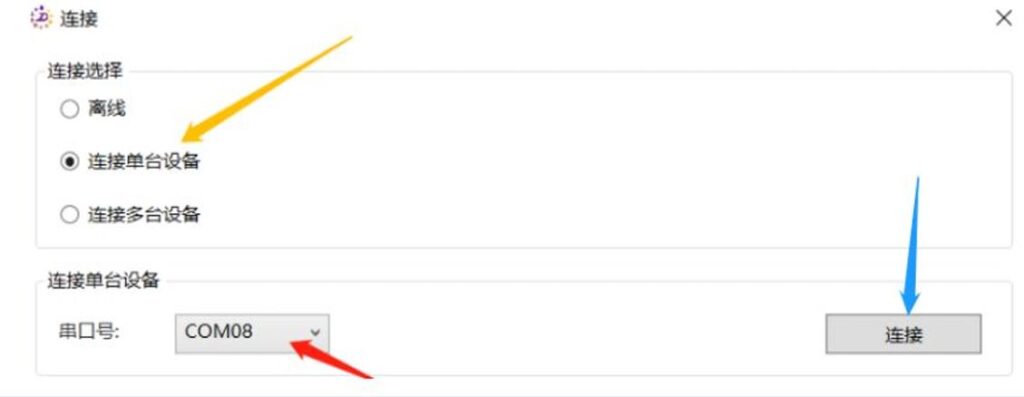
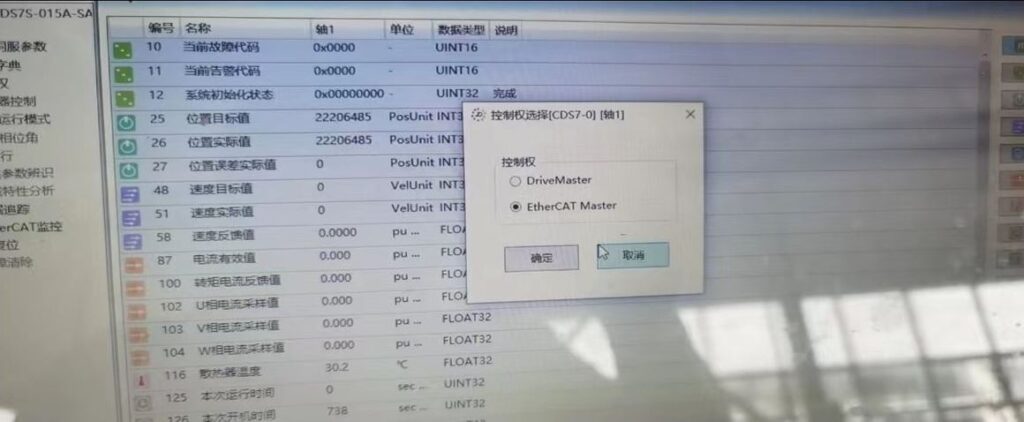
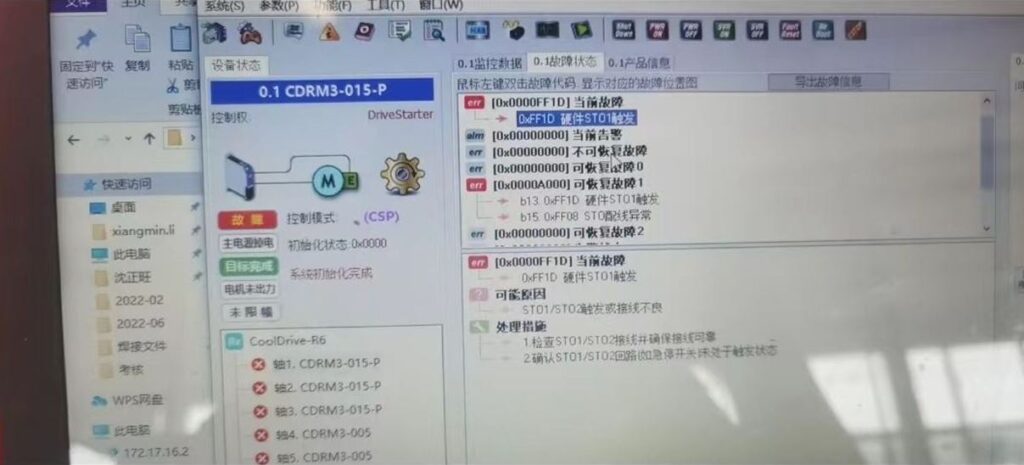
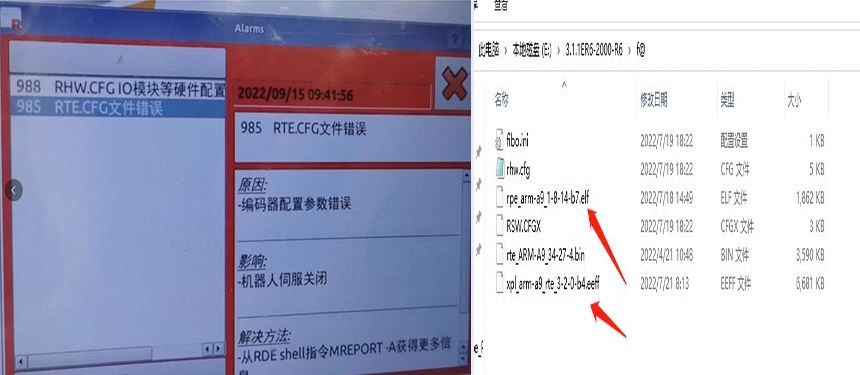
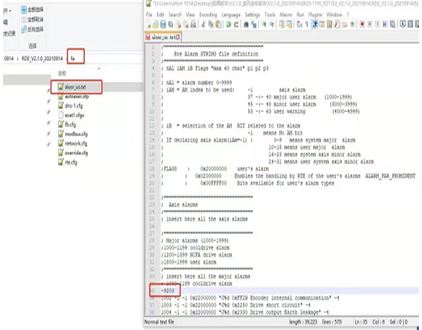
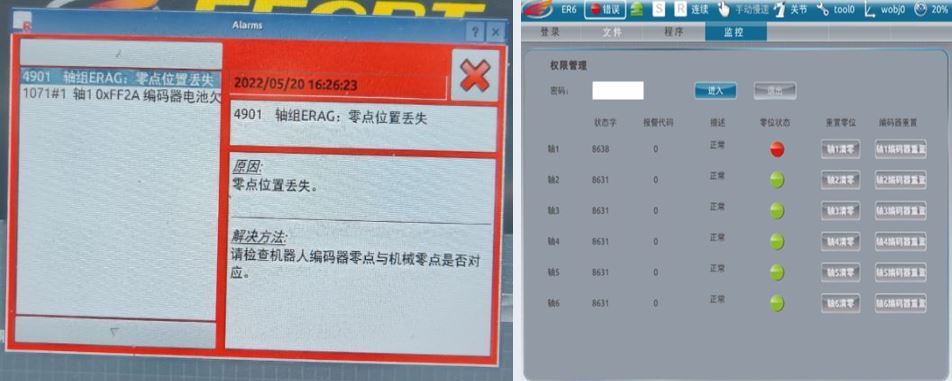
Use el software DriveStarter para leer la información de alarma del eje auxiliar (alarma de un solo eje).
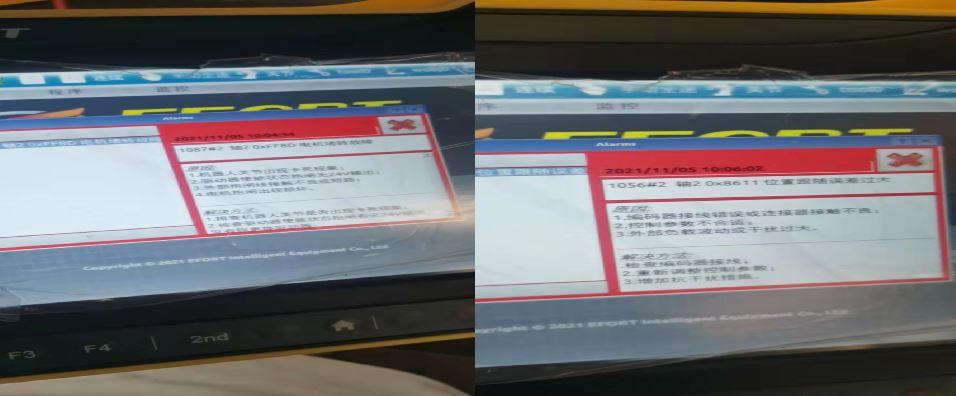
Lo más probable es que exista una anomalía en la alimentación del controlador. Verifique la alimentación.
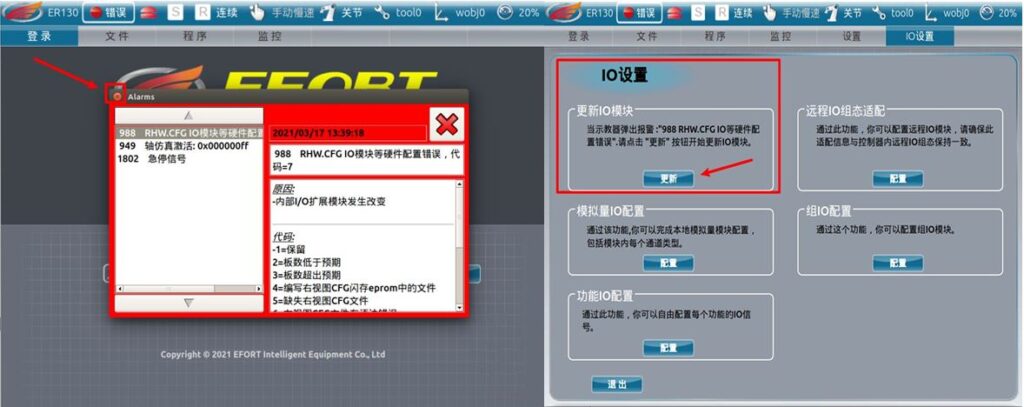
Secuencia de prueba:
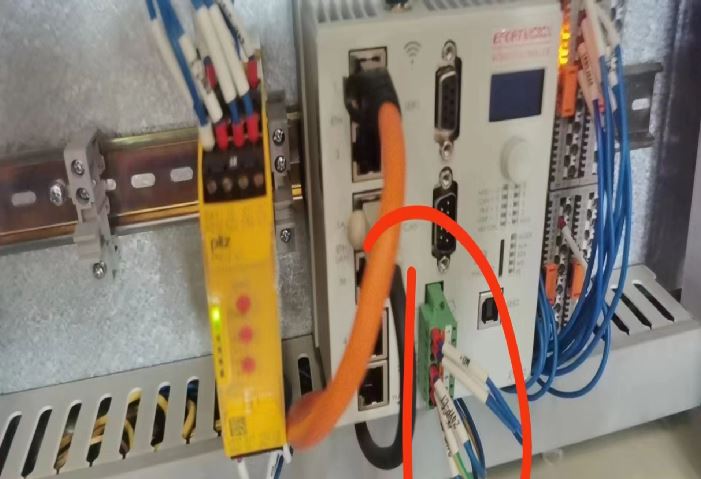
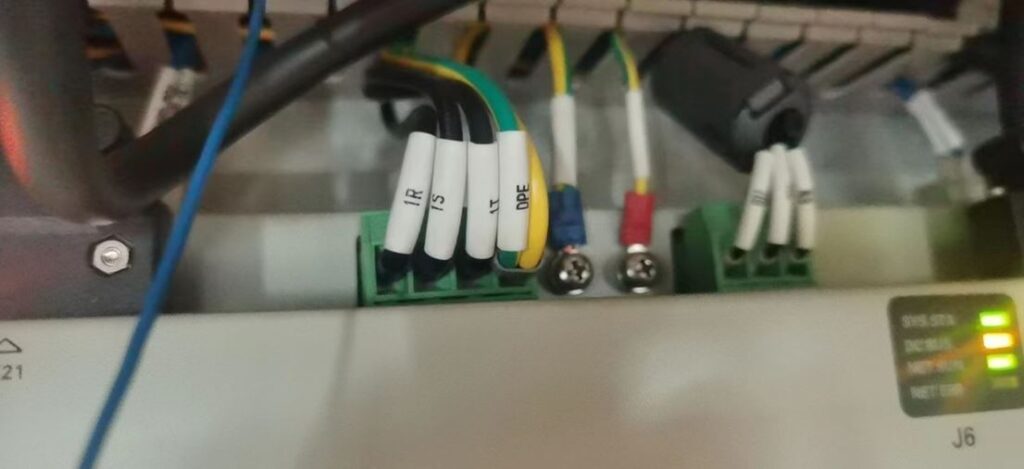
Mida el voltaje entre cada par de terminales de entrada R, S y T del controlador de seis ejes.
Si las tres líneas no tienen voltaje, verifique si la fuente de alimentación externa desde la caja de potencia al gabinete de control tiene 380V.
Si alguna línea no tiene 220V, pruebe la continuidad del cable etiquetado en esa línea.